ฟีดเดอร์แบบสั่นสำหรับริเวต: ทิศทางหัวก่อนและคู่มือเลือกประเภทฟีดเดอร์
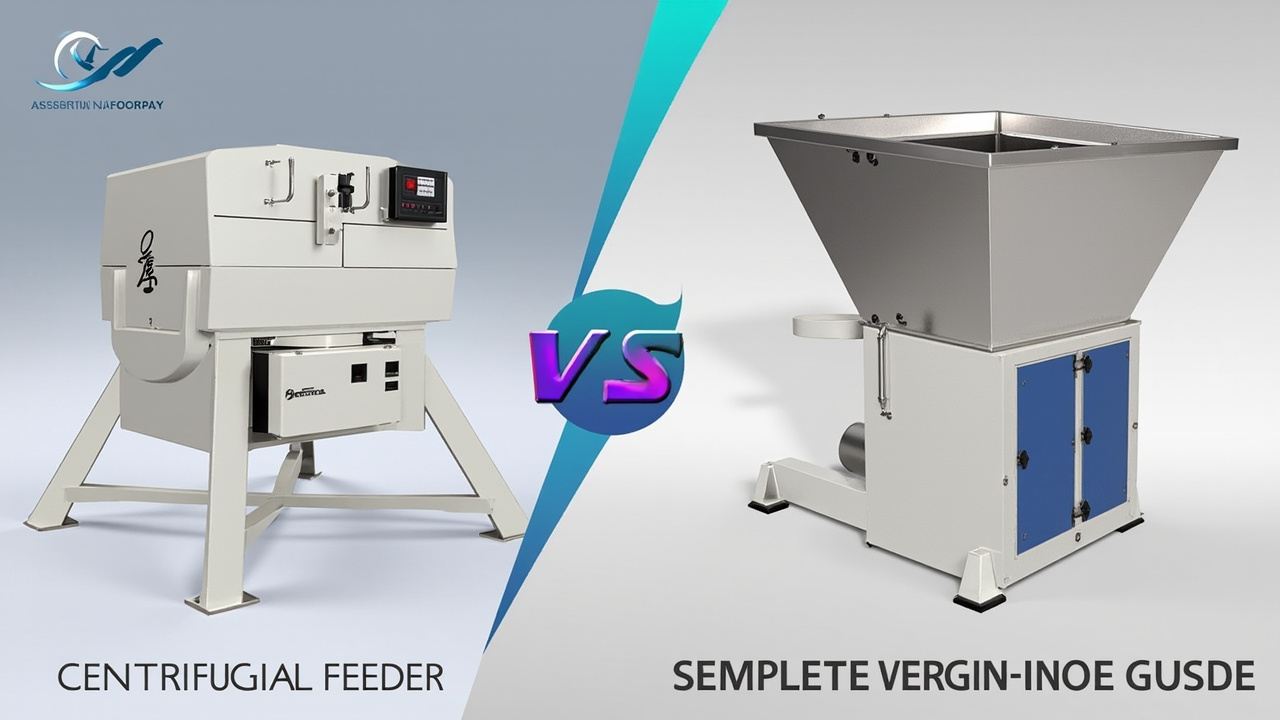
คู่มือครบถ้วนสำหรับฟีดเดอร์แบบสั่นสำหรับริเวต เปรียบเทียบฟีดเดอร์แบวล์แบบสั่นกับฟีดเดอร์เหวี่ยงหนีศูนย์ ครอบคลุมทูลลิ่งทิศทางหัวก่อน และการเพิ่มประสิทธิภาพอัตราฟีดสำหรับฟีดดิ้งริเวต
ความท้าทายหลัก
ความท้าทายในการฟีดริเวตในการประกอบอัตโนมัติ
ริเวตใช้กันอย่างแพร่หลายในการประกอบอวกาศ ยานยนต์ อิเล็กทรอนิกส์ และก่อสร้าง แต่เรขาคณิตที่เป็นเอกลักษณ์สร้างความท้าทายเฉพาะในการฟีด ประเภทริเวตที่พบบ่อยที่สุด — ริเวตแข็ง ริเวตกึ่งท่อ และริเวตอ้วน — ล้วนมีลักษณะไม่สมมาตรหัว-ก้านที่ต้องจัดวางทิศทางให้ถูกต้องก่อนการใส่ กระบวนการริเวตอัตโนมัติส่วนใหญ่ต้องการริเวตที่ส่งมอบหัวก่อนเข้าเครื่องมือริเวต ทำให้ทิศทางหัวก่อนอย่างสม่ำเสมอเป็นเป้าหมายหลักของการฟีด
ริเวตอลูมิเนียมและทองแดงเป็นความท้าทายเพิ่มเติมเนื่องจากความนิ่มของวัสดุ ริเวตโลหะนิ่มเหล่านี้ถูกขีดข่วน บุบ หรือเสียรูปได้ง่ายจากการสัมผัสกับพื้นผิวทูลลิ่งแข็ง ซึ่งอาจกระทบต่อความแข็งแรงของข้อต่อและรูปลักษณ์ ฟีดเดอร์ต้องจัดการชิ้นงานเปราะบางเหล่านี้ด้วยความอ่อนโยนในขณะที่ยังได้ทิศทางที่เชื่อถือได้และอัตราฟีดที่เพียงพอ
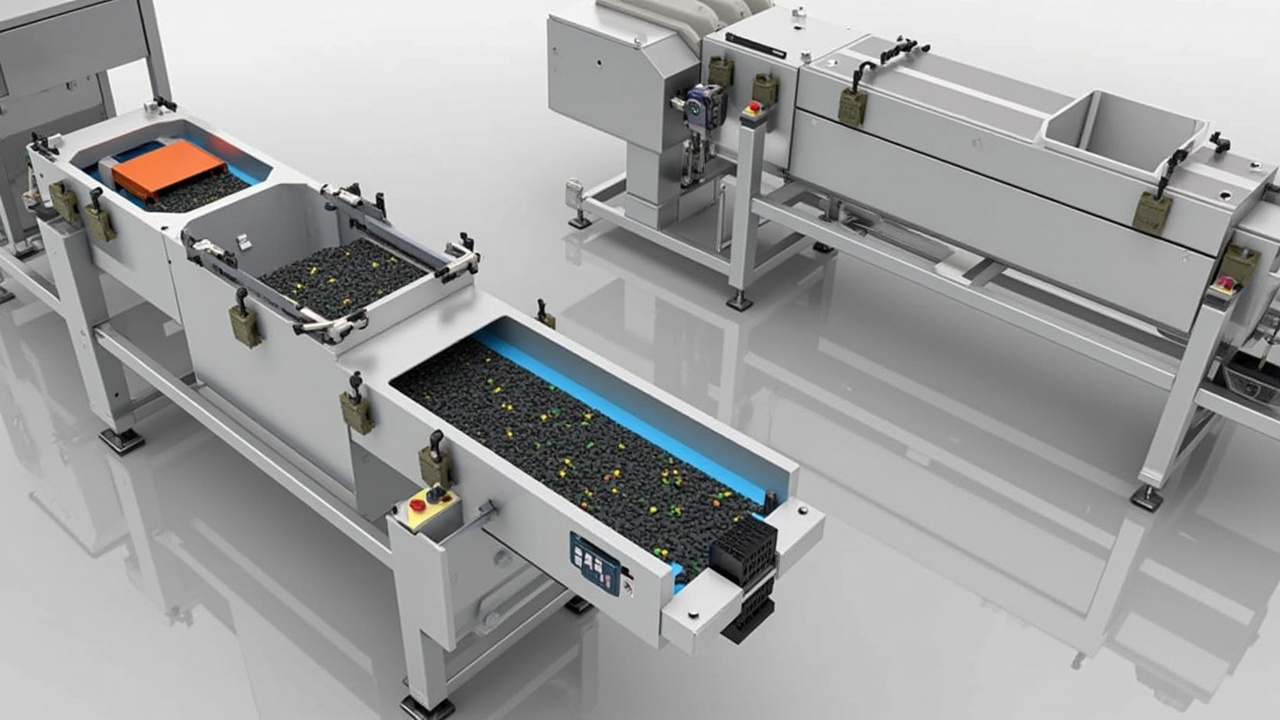
การดำเนินการริเวตความเร็วสูงในการประกอบยานยนต์และอิเล็กทรอนิกส์มักต้องการอัตราฟีด 60–120 ริเวตต่อนาที ผลักดันขีดจำกัดของสิ่งที่ฟีดเดอร์แบวล์แบบสั่นสามารถทำได้ ทำให้ผู้ผลิตหลายรายพิจารณาฟีดเดอร์เหวี่ยงหนีศูนย์เป็นเทคโนโลยีทางเลือกสำหรับแอปพลิเคชันฟีดริเวต
ทูลลิ่งทิศทางหัวก่อน
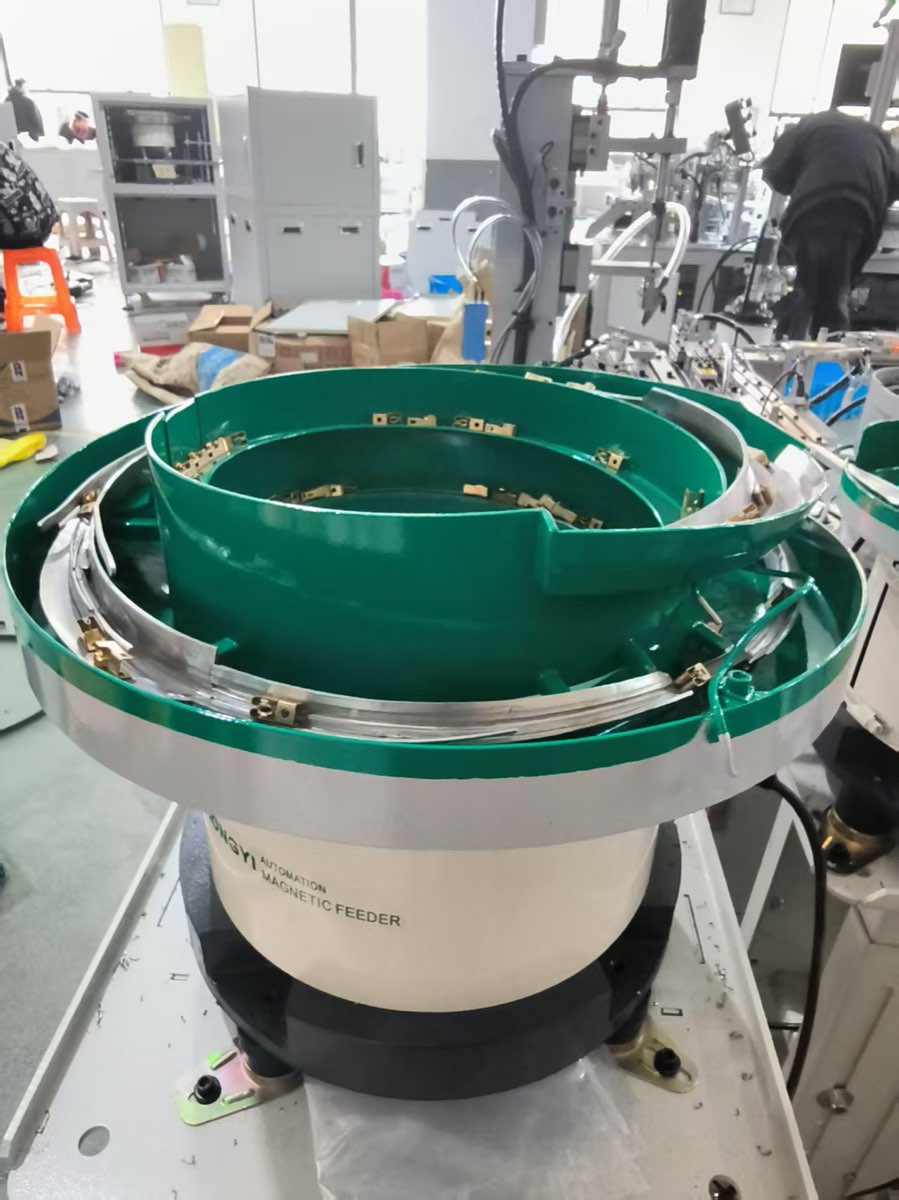
การได้ทิศทางหัวก่อนอย่างสม่ำเสมอต้องใช้ทูลลิ่งที่ใช้ประโยชน์จากความแตกต่างของเส้นผ่านศูนย์กลางระหว่างหัวริเวตและก้าน แนวทางที่พบบ่อยที่สุดใช้รางที่มีรูปร่างลดหลั่น:
- ใบปัด — ใบโค้งที่ทุบริเวตออกจากรางหากยืนตรง ทำให้ริเวตทั้งหมดนอนราบก่อนเข้าสู่โซนทิศทาง
- ช่องเลือกเส้นผ่านศูนย์กลาง — ส่วนรางแคบที่ความกว้างรางใหญ่กว่าเส้นผ่านศูนย์กลางก้านเล็กน้อยแต่เล็กกว่าเส้นผ่านศูนย์กลางหัว
ผลิตภัณฑ์ที่แนะนำ
พร้อมที่จะทำให้การผลิตของคุณเป็นอัตโนมัติ?
รับคำปรึกษาฟรีและใบเสนอราคาละเอียดภายใน 12 ชั่วโมงจากทีมวิศวกรของเรา