การรวม Cobot กับตัวป้อนแบบชามสั่น: แนวทางปฏิบัติที่ดีที่สุดสำหรับปี 2026
การเพิ่มขึ้นของการป้อนชิ้นงานด้วย Cobot
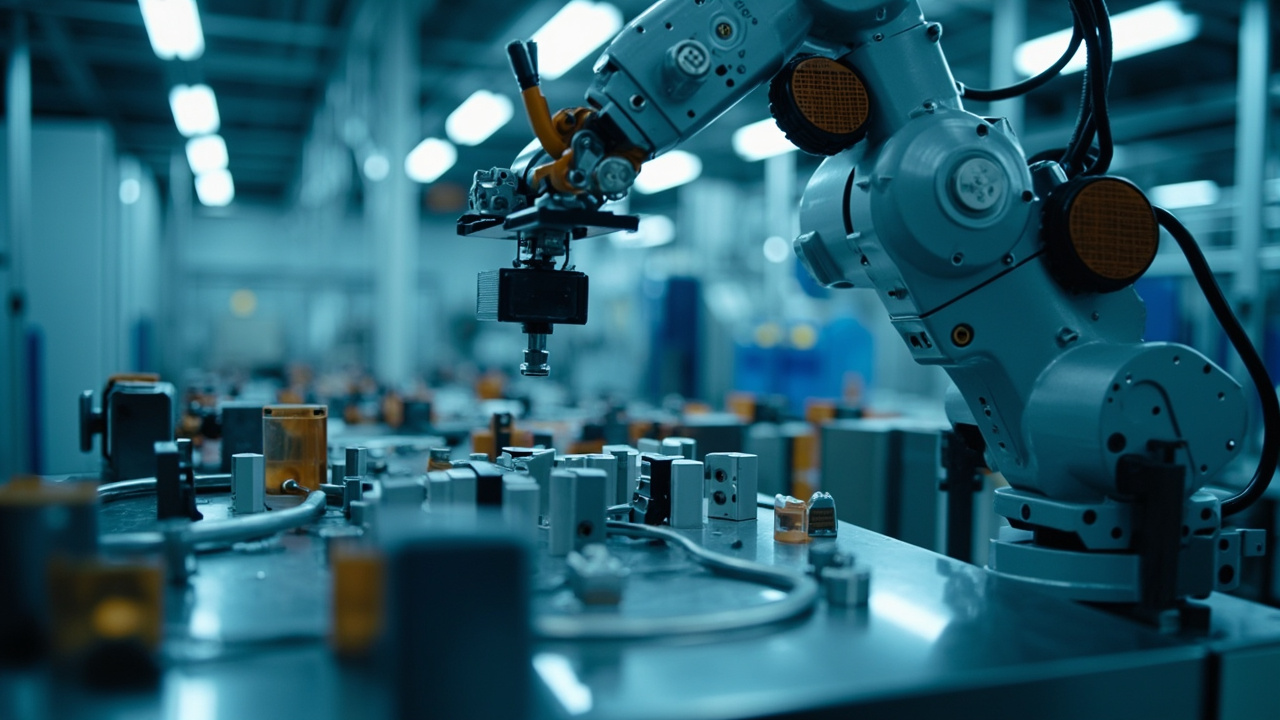
หุ่นยนต์ทำงานร่วมกัน (cobot) ได้เปลี่ยนแปลงพื้นโรงงาน โดยนำเสนอทางเลือกที่ปลอดภัยและยืดหยุ่นกว่าหุ่นยนต์อุตสาหกรรมแบบดั้งเดิม อย่างไรก็ตาม cobot นั้นเร็วเท่ากับชิ้นงานที่มันได้รับ การรวม cobot กับตัวป้อนชามสั่นเชื่อมช่องว่างระหว่างการวางตำแหน่งชิ้นงานความเร็วสูงและการดูแลเครื่องจักรที่ยืดหยุ่นและปลอดภัย
ในการผลิตแบบหลากหลายปริมาณต่ำ (HMLV) การผสมผสานนี้ช่วยให้เปลี่ยนผลิตภัณฑ์ได้รวดเร็วและเซลล์อัตโนมัติที่ปรับตัวได้ คู่มือนี้สรุปแนวทางปฏิบัติที่ดีที่สุดสำหรับการผสานความเร็วที่เชื่อถือได้ของตัวป้อนชามกับสติปัญญาที่ปรับตัวได้ของ cobot
ความท้าทายหลักในการรวม Cobot
| ความท้าทาย | ข้อจำกัดของ Cobot | โซลูชันตัวป้อน |
|---|---|---|
| เวลาวงจร | Cobot ช้ากว่าหุ่นยนต์ SCARA หรือ Delta | ตัวป้อนต้องกันชิ้นงานและนำเสนอหลายชิ้นพร้อมกัน |
| ความแม่นยำในการส่งมอบ | ความทำซ้ำได้ของ cobot ดี แต่ความแม่นยำสัมบูรณ์อาจแตกต่าง | กลไกปล่อยแม่นยำด้วย V-block หรือเครื่องมือยืดหยุ่น |
| การตรวจสอบชิ้นงาน | Cobot ต้องรู้ว่าชิ้นงานพร้อมหยิบ | เซ็นเซอร์ออปติคัลหรือไฟเบอร์ออปติกที่จุดหยิบ |
| เวลาเปลี่ยนผลิตภัณฑ์ | Cobot ตั้งโปรแกรมใหม่ได้ง่าย แต่ตัวป้อนเป็นเครื่องมือแข็ง | เครื่องมือชามเปลี่ยนเร็วหรือตัวป้อนแบบยืดหยุ่นนำทางด้วยวิสัยทัศน์ |
เชี่ยวชาญการส่งมอบ: กลไกปล่อย
จุดที่สำคัญที่สุดในระบบคือที่รางตัวป้อนจบและ cobot เริ่มทำงาน Cobot ต้องการเป้าหมายที่สม่ำเสมอและนิ่ง
- กลไกปล่อยแม่นยำ: ตัวหยุดแบบง่ายที่ปลายรางเชิงเส้นมักไม่เพียงพอ ชิ้นงานต้องถูกแยกจากการสั่นสะเทือนของรางและถืออยู่ในตำแหน่งที่รู้จักอย่างมั่นคง ใช้ V-block ที่แม่นยำหรือกริปเปอร์นิวเมติกเพื่อล็อกชิ้นงานไว้สำหรับการหยิบ
- ความยืดหยุ่น: เนื่องจากความแม่นยำสัมบูรณ์ของ cobot อาจเบี่ยงเบนเล็กน้อยในพื้นที่ทำงานขนาดใหญ่ การเพิ่มความยืดหยุ่นทางกลไกเล็กน้อย (สปริงหรืออีลาสโตเมอร์) ให้กับเครื่องมือปลายแขน (EOAT) หรือรังกลไกปล่อยช่วยป้องกันการสะดุดและความเสียหายของชิ้นงานระหว่างการหยิบ
- การหยิบหลายชิ้น: เนื่องจาก cobot ช้ากว่า วิธีหนึ่งที่จะปรับปรุงเวลาวงจรโดยรวมคือออกแบบกลไกปล่อยให้นำเสนอ 2, 4 หรือแม้กระทั่ง 8 ชิ้นงานพร้อมกัน Cobot หยิบทั้งหมดในการเคลื่อนไหวเดียวและวางในเครื่องจักรหรือการประกอบ
การรวมเซ็นเซอร์และการสื่อสาร
ตัวควบคุม cobot ต้องการการจับมือที่สะอาดและเชื่อถือได้กับระบบตัวป้อน
- การมีอยู่ของชิ้นงาน: ใช้เซ็นเซอร์ไฟเบอร์ออปติกหรือเลเซอร์คุณภาพสูงที่กลไกปล่อย Cobot ควรเริ่มการเคลื่อนไหวหยิบเฉพาะเมื่อสัญญาณ "ชิ้นงานมีอยู่" สูง หากสัญญาณลดลงระหว่างการหยิบ cobot ควรยกเลิกและลองใหม่
- การจัดการบัฟเฟอร์: ตัวป้อนควรทำงานอย่างอิสระเพื่อให้รางเชิงเส้นเต็ม โดยใช้เซ็นเซอร์ระดับรางของตัวเอง Cobot โต้ตอบกับเซ็นเซอร์กลไกปล่อยสุดท้ายเท่านั้น
- การกู้คืนจากข้อผิดพลาด: หาก cobot หยิบชิ้นงานไม่สำเร็จหลังจากลองสามครั้ง ควรเรียกสัญญาณเตือนหรือลำดับการล้าง อย่าปล่อยให้ระบบหยุดนิ่ง Cobot มักสามารถตั้งโปรแกรมให้ทำการ "ส่าย" หรือเคลื่อนไหวลองใหม่เพื่อล้างการสะดุดเล็กน้อย
ทางเลือกที่นำทางด้วยวิสัยทัศน์
ในขณะที่ชามสั่นแบบเครื่องมือแข็งยอดเยี่ยมสำหรับปริมาณสูง แอปพลิเคชัน HMLV บางอย่างได้รับประโยชน์จากแนวทางแบบผสม หาก cobot เดียวต้องจัดการชิ้นงานที่แตกต่างกัน 10 ชิ้นในหนึ่งกะ ตัวป้อนแบบยืดหยุ่นที่นำทางด้วยวิสัยทัศน์ (เช่นระบบ AnyFeeder หรือ Asyril) อาจเหมาะสมกว่าการสลับชามเครื่องมือแข็ง 10 ชาม
อย่างไรก็ตาม หากปริมาณชิ้นงานสูงพอที่จะสมควรกับเครื่องมือ ชามสั่นแบบดั้งเดิมที่ป้อนเข้าโซนหยิบของ cobot ที่นำทางด้วยวิสัยทัศน์นำเสนอสิ่งที่ดีที่สุดจากทั้งสองโลก: การวางตำแหน่งความเร็วสูงและการหยิบที่ยืดหยุ่น
รายการตรวจสอบสำหรับผู้ซื้อเซลล์ Cobot-ตัวป้อน
- กำหนดเวลาวงจร: ระบุชิ้นงานต่อนาที (PPM) ที่ต้องการอย่างชัดเจน ตรวจสอบว่าความเร็วการทำงานที่ปลอดภัยของ cobot สามารถตอบสนองเป้าหมายนี้เมื่อรวมกับอัตราการนำเสนอของตัวป้อน
- ระบุการจับมือ: ตัดสินใจว่าตัวควบคุม cobot หรือ PLC กลางจะจัดการ I/O ระหว่างตัวป้อนและหุ่นยนต์
- ขอการทดสอบ: ทดสอบระบบเต็มรูปแบบเสมอ — ตัวป้อน กลไกปล่อย และ cobot — โดยใช้ชิ้นงานผลิตภัณฑ์จริงก่อนการยอมรับขั้นสุดท้าย
การรวม cobot กับตัวป้อนแบบสั่นต้องการวิศวกรรมที่รอบคอบที่จุดส่งมอบ หากคุณกำลังออกแบบเซลล์การดูแลเครื่องจักรอัตโนมัติหรือการประกอบ ติดต่อทีมวิศวกร Huben Automation เพื่อหารือเกี่ยวกับแอปพลิเคชันของคุณและขอการตรวจสอบความเป็นไปได้โดยละเอียด
พร้อมที่จะทำระบบอัตโนมัติในการผลิตของคุณ?
รับคำปรึกษาฟรีและใบเสนอราคาละเอียดภายใน 12 ชั่วโมงจากทีมวิศวกรของเรา


