
주요 특징
비전 유도
AI 인식 기반 고해상도 카메라 시스템이 임의 방향의 부품을 식별하고 위치를 파악하여 기계식 금형 없이 로봇 픽업을 가능하게 합니다
고유연성
동일한 시스템에서 여러 부품 유형 처리 — 새 레시피를 로드하기만 하면 피더가 즉시 적응하며 기계적 변경이 필요 없습니다
빠른 체인지오버
새 레시피를 선택하여 15분 이내에 다른 부품으로 전환 — 표준 볼피더의 기계적 금형 교체 30-60분에 비해 대폭 단축
정밀 핸들링
부드러운 진동 진폭과 소프트 서피스 플랫폼이 깨지기 쉽거나 코팅되거나 연마된 부품의 손상을 방지합니다
사양
플랫폼 크기 | 200mm / 350mm / 500mm |
비전 시스템 | 5MP 산업용 카메라 |
부품 크기 범위 | 2mm – 80mm |
공급 속도 | 10 – 60 ppm |
체인지오버 시간 | < 15분 |
시스템당 부품 유형 | 무제한 (레시피 기반) |
로봇 연동 | UR / FANUC / Omron / Doosan |
통신 | Modbus TCP / Profinet / EtherCAT |
보증 | 12개월 |
리드타임 | 15–25 영업일 |
가격 범위 | $3,000 – $12,000 |
적용 분야
전자
의료기기
소비재
자동차
항공우주
화장품
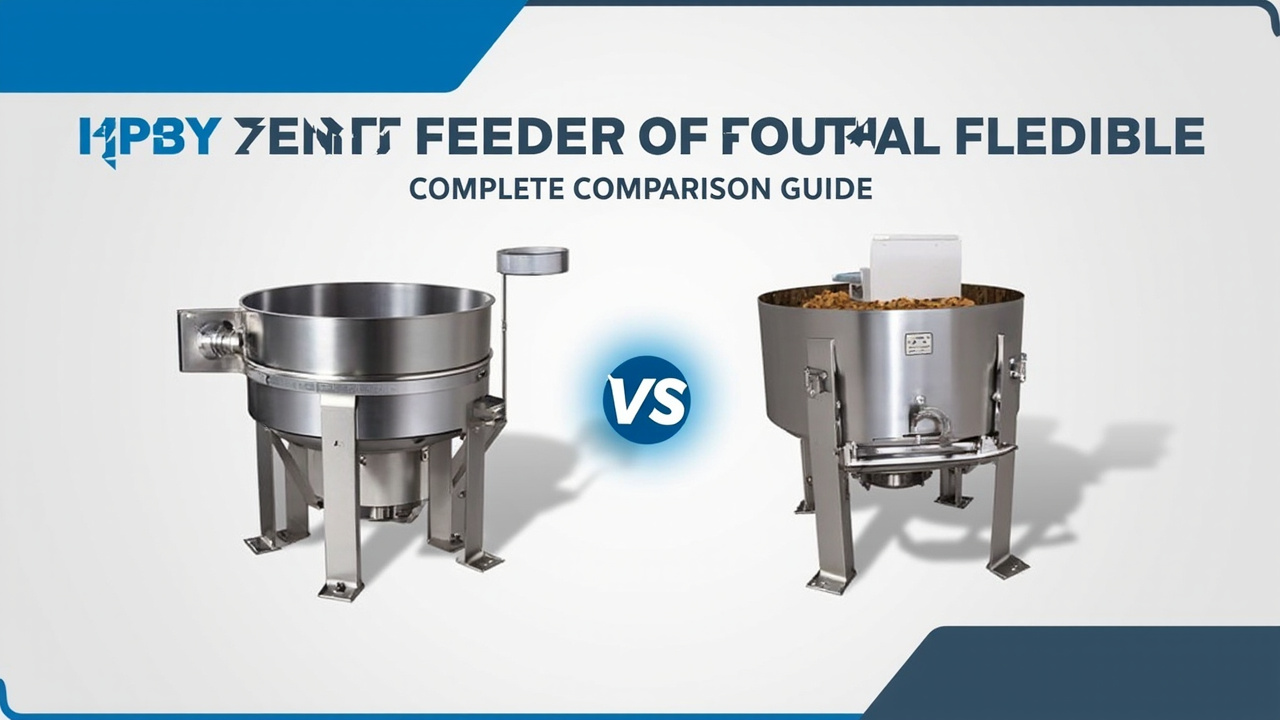
플렉시블 진동피더란?
플렉시블 진동피더는 진동 플랫폼과 머신비전 및 로봇 픽업을 결합하여 기계식 금형 교체 없이 여러 부품 유형을 처리하는 고급 부품 공급 시스템입니다. 고정 금형으로 하나의 특정 부품을 정렬하는 표준 볼피더와 달리, 플렉시블 피더는 카메라와 AI를 사용하여 임의 방향의 부품을 식별하고 로봇이 올바르게 픽업하도록 안내합니다.
이 기술은 다품종 유연성, 소량 생산 또는 기존 기계적 방법으로 방향 정렬이 어려운 부품 핸들링이 필요한 제조 라인을 변화시키고 있습니다. Huben Automation은 콤팩트한 200mm 플랫폼부터 대형 500mm 시스템까지 완전한 플렉시블 공급 시스템 라인업을 공장 직접 가격으로 제공합니다.
플렉시블 피더 작동 원리
플렉시블 공급 프로세스는 지속적으로 반복되는 4개의 핵심 단계로 구성됩니다:
- 진동 & 분리 — 플랫폼이 제어된 주파수로 진동하여 부품을 단일 층으로 펼치고 겹친 부품을 분리하며 카메라 시야로 이동시킵니다.
- 비전 인식 — 고해상도 산업용 카메라가 플랫폼 이미지를 캡처합니다. AI 기반 이미지 처리가 각 부품을 식별하고 유형을 분류하며 정확한 위치와 방향을 결정합니다.
- 로봇 통신 — 비전 시스템이 픽 좌표(X, Y, 회전 각도)를 로봇 컨트롤러에 전송합니다. 여러 픽 후보는 접근성 및 방향 품질을 기준으로 우선순위가 지정됩니다.
- 로봇 픽업 — 로봇이 진공, 자석 또는 그리퍼 엔드이펙터를 사용하여 정렬된 부품을 픽업하여 다음 생산 단계를 위한 목표 위치에 배치합니다.
플렉시블 피더 vs 표준 볼피더
올바른 피더 기술을 선택하는 것은 애플리케이션 요구사항에 따라 결정됩니다:
| 특징 | 표준 볼피더 | 플렉시블 피더 |
|---|---|---|
| 부품 유형 | 단일 부품 | 다수 부품 (레시피 기반) |
| 체인지오버 | 30-60분 (금형 교체) | < 15분 (레시피 변경) |
| 공급 속도 | 최대 300+ ppm | 최대 60 ppm |
| 방향 정렬 | 기계식 금형 | 비전 + 로봇 |
| 초기 비용 | 낮음 | 중간 |
| 부품당 비용 | 대량 시 매우 낮음 | 소량 시 더 낮음 |
| 적용 | 대량 단일 품목 | 다품종, 소량, 정밀 부품 |
자주 묻는 질문
동일한 라인에서 여러 부품 유형을 처리해야 할 때, 생산에 빈번한 체인지오버가 있을 때, 부품이 기계식 금형에 너무 정밀할 때, 또는 부품 형상이 기존 방향 정렬 메커니즘에 너무 복잡할 때 플렉시블 피더를 선택하세요. 단일 부품 대량 생산에는 표준 볼피더가 더 비용 효율적입니다.
당사의 플렉시블 피더는 Universal Robots (UR), FANUC, Omron, Doosan, KUKA 및 ABB를 포함한 모든 주요 협동로봇 및 산업용 로봇 브랜드와 연동됩니다. 표준 통신 프로토콜(Modbus TCP, Profinet, EtherCAT)을 제공하며 모든 로봇 플랫폼에 맞게 연동을 맞춤 설정할 수 있습니다.
진동 플랫폼 위에 장착된 고해상도 산업용 카메라가 임의 위치의 부품 이미지를 캡처합니다. AI 기반 이미지 처리가 각 부품을 식별하고 방향을 결정하며 최적의 픽 위치를 계산합니다. 이 데이터는 로봇으로 전송되어 부품을 정밀하게 픽앤드플레이스합니다. 전체 사이클은 부품당 1-3초가 소요됩니다.
네. 당사의 플렉시블 피더는 2mm 크기의 부품까지 처리할 수 있습니다. 매우 작은 부품(5mm 미만)의 경우 특수 고해상도 카메라와 마이크로 부품에 최적화된 진동 파라미터를 사용합니다. 단, 극히 작고 단순한 부품(M3 이하 나사 등)의 초고속 공급에는 표준 볼피더가 여전히 더 효율적일 수 있습니다.
관련 기사
Comparison Guide
Flexible Vibratory Feeder vs Standard Bowl Feeder: Complete Comparison Guide
10 min read
Industry Insights
Future of Automated Parts Feeding: AI, Robotics & Industry 4.0 Trends in 2025
10 min read
Technical Guide